
"Sinds 2000 werk ik aan de ontwikkeling van sculpturen met expressieve beweging als uitgangspunt."
Actief Dynamisch Gebalanceerd Robot Systeem - 2009-2012
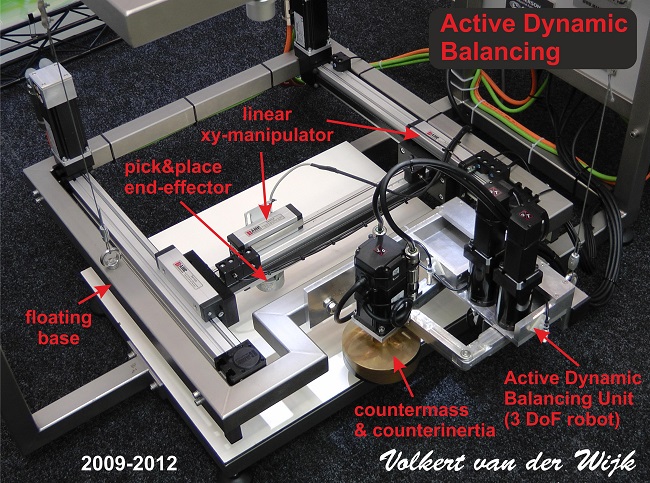
This photo and video show a demonstrator of active dynamic balancing: a robotic pick & place manipulator which is dynamically balanced actively by a second separately controlled robotic manipulator to have a base frame without vibrations.
Active balancing means that the additional balancing elements (countermasses and -inertias) are driven with separate actuators, as opposed to passive balancing where the balancing elements are mechanically connected to the mechanism by e.g. links or gears.
First the unbalanced motion of the xy-manipulator is shown, where the shaking forces and shaking moment (i.e. the sum of reaction forces and the sum of reaction moments on the base) cause the base to move while floating by support cables.
Subsequently, the second robotic manipulator attached as a unit to the same base frame is activated and controlled such that it produces equal but opposite reaction forces and reaction moments for which the base remains still. Thus, all the reaction forces and reaction moments on the base frame then sum up to 0.
The last part shows how also a payload of 385 grams can be picked & placed in a dynamically balanced way by adapting the feedforward control of the balancing robot.
Back in 2008 when I had just finished my master thesis full of theory on dynamic balancing of mechanisms and robotics, I felt the urge to build something: a robotic system which could demonstrate the effect of dynamic balance. I had in mind a small robotic system which would fit in a briefcase so I could bring it around while traveling.
I had just met Alexander Stamhuis of Stamhuis Lineairtechiek at an industrial fair who was very enthusiastic to sponsor the development of the system together with a few collaborating companies. Alexander convinced me to use a 'slightly larger' size of linear xy-manipulator for a better performance and quality and due to my unawareness of the significant size of the computer controllers and their electrical enclosure... it ended up as the quite-of-a-size system shown here (for which I still need to find a suitable briefcase...).
After I had build the system, my former graduate students Pieter de Jong and Corné Stuij have used it for their thesis research and have contributed to numerous improvements. The robot system has been on display at multiple industrial fairs and still is continuously in use as a demonstrator at the University, currently in Delft.
Publicaties:
|
|