
"Since 2000 I have been working on the development of sculptures with expressive motion as a starting point."
DUAL-V - 2010-2011
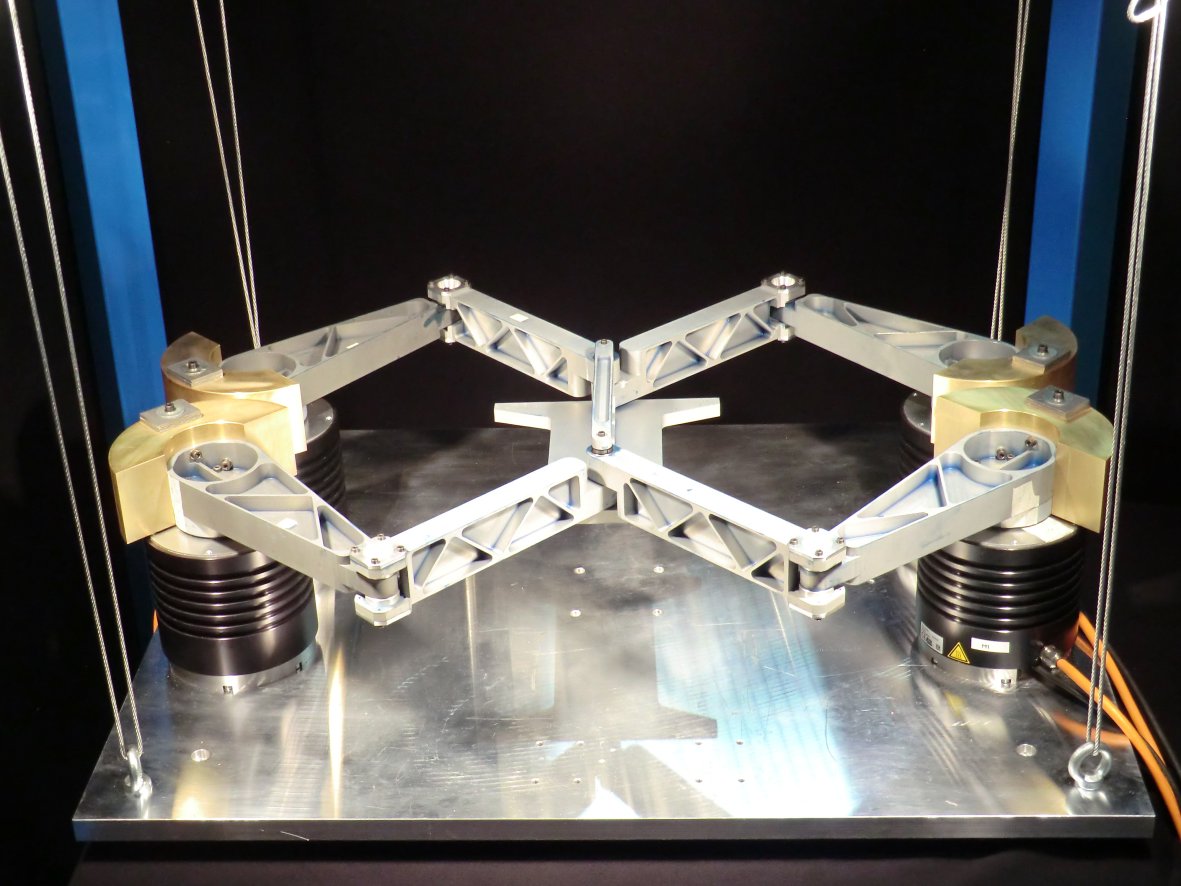
Dynamically balanced high-speed robot manipulator (2010-2011) (patented)
Prototype of the dynamically balanced planar 4-RRR parallel manipulator DUAL-V designed by Volkert van der Wijk (University of Twente, NL) in collaboration with LIRMM (FR). The manipulator moves at high speeds without exerting vibrations to the base (which is suspended by cables to float around). The manipulator is redundantly actuated with four direct drive actuators on the base and its design is based on parallel links with counter-masses about the fixed pivots.
The DUAL-V is the first high-speed dynamically balanced parallel manipulator that was designed, built, and tested. It successfully performed motions up to 180 m/s^2. By evaluation and comparison with the unbalanced manipulator, experiments and simulations showed that the balanced manipulator has up to 97% lower shaking forces, up to a 96% lower shaking moment, and about 71% lower bearing forces. The actuator torques of the balanced manipulator were about 1.6 times higher.
Publications:
|
|
Patent:
|