"Since 2000 I have been working on the development of sculptures with expressive motion as a starting point."
This section shows the designs and prototypes of mechanisms and robotics from my scientific work.
Currently I am a Gentleman (independent) Scientist related to TU Delft (NL) with the research group of Mechatronic System Design. Also I am the chairman of the IFToMM international technical committee for Computation Kinematics.
Here you find a list of my scientific publications and my dissertation full of theory on inherent dynamic balancing, with various application examples.

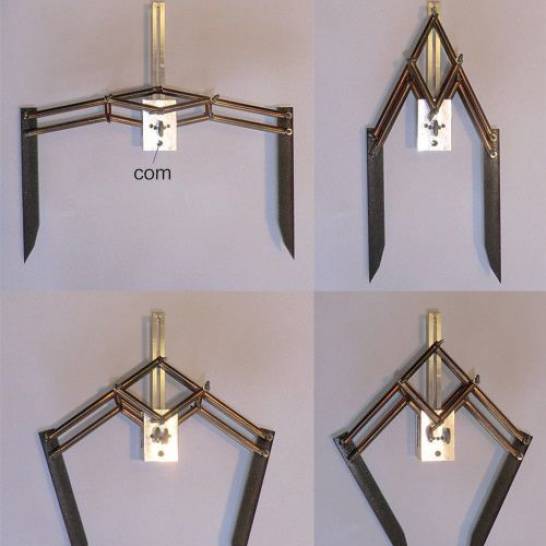
Dynamically balanced inverted four-bar linkage as superfast robotic manipulator arm
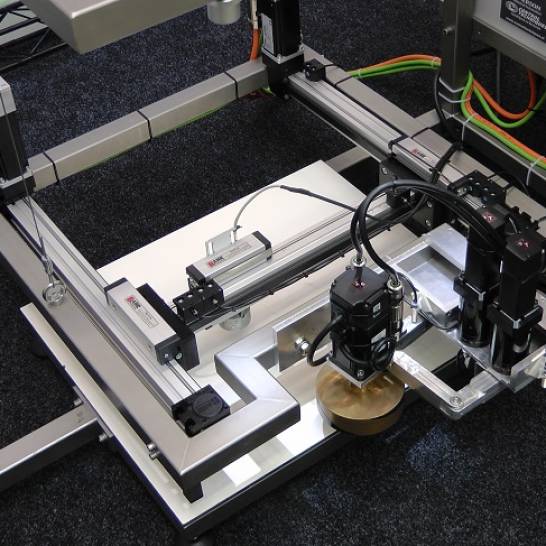
Robot manipulator for scanning Artwork (coming soon....)
Fast balanced manipulator arm for drones (coming soon....)
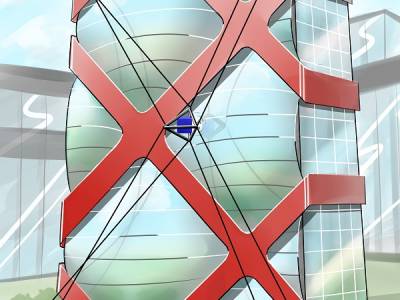
Washing device driven and controlled by winding and unwinding long cables along the facade
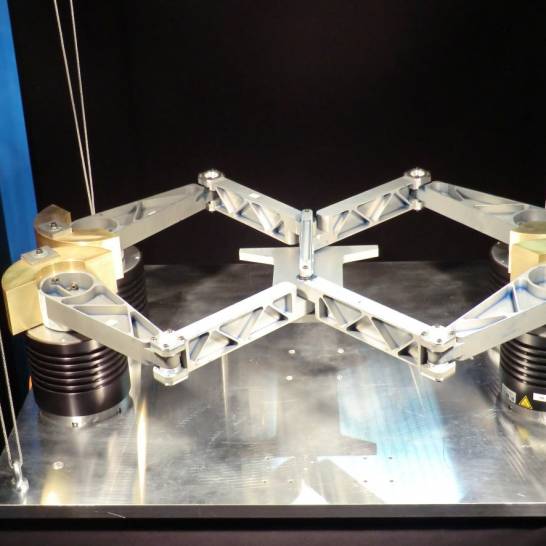
Actively controlled dynamic balancing unit applied to a pick-and-place robot