
"Sinds 2000 werk ik aan de ontwikkeling van sculpturen met expressieve beweging als uitgangspunt."
In dit gedeelte vindt u ontwerpen en prototypen van mechanieken en robotica vanuit mijn wetenschappelijke werk.
Momenteel werk ik als zogeheten Gentleman (onafhankelijk) wetenschapper in relatie met de TU Delft bij de onderzoeksgroep van Mechatronisch Systeem Ontwerp. Ook ben ik voorzitter van de IFToMM internationale technische commissie voor Computationele Kinematica.
Hier is een lijst van mijn wetenschappelijke publicaties te vinden en dit is mijn dissertatie vol met theory over inherente dynamische balans, met verschillende voorbeelden van toepassingen.

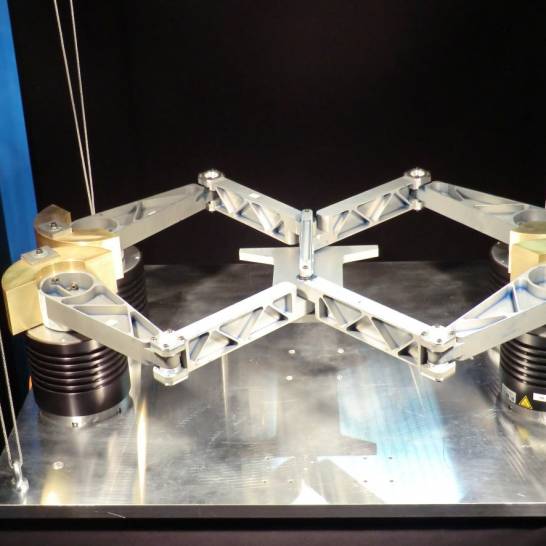
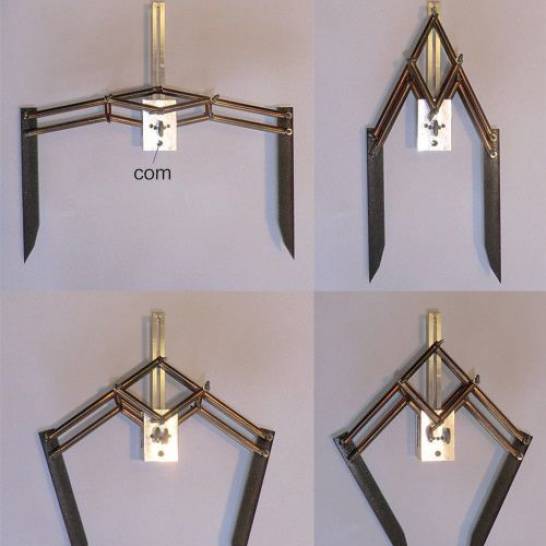
Dynamisch gebalanceerd omgekeerd vierstangenmechaniek als supersnelle robot manipulator arm
Robot voor het scannen van Kunstwerken (komt binnenkort...)
Snelle gebalanceerde robotarm voor drones (komt binnenkort....)
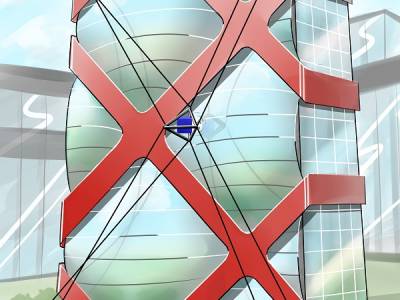
Wasapparaat aangedreven en bestuurd door het op- en afwikkelen van lange kabels langs de façade
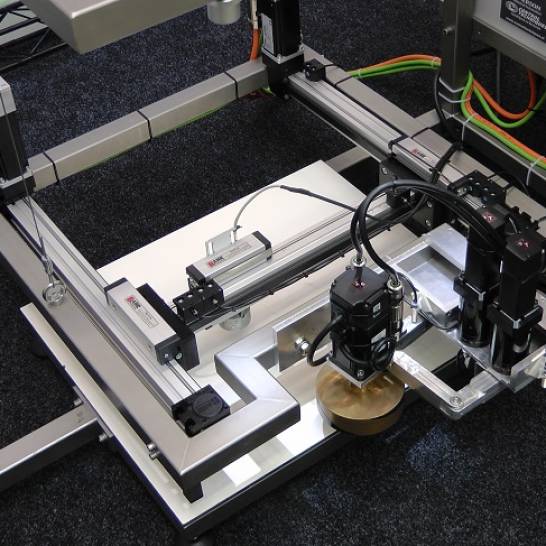
Actief gestuurde dynamische balanceerunit toegepast op een pak-en-plaats robot

Verschillende balansoplossingen voor de beroemde Delta robot manipulator